


Showcase
In this video, the platform is controlled via GUI widgets from remote computer.
Left part of GUI contains touchpad widget that allows to set desired linear velocity and slider that allows to set angular velocity.
Central part of GUI shows video stream from ORB-SLAM2 in real-time.
Right part of GUI shows wheel odometry estimation
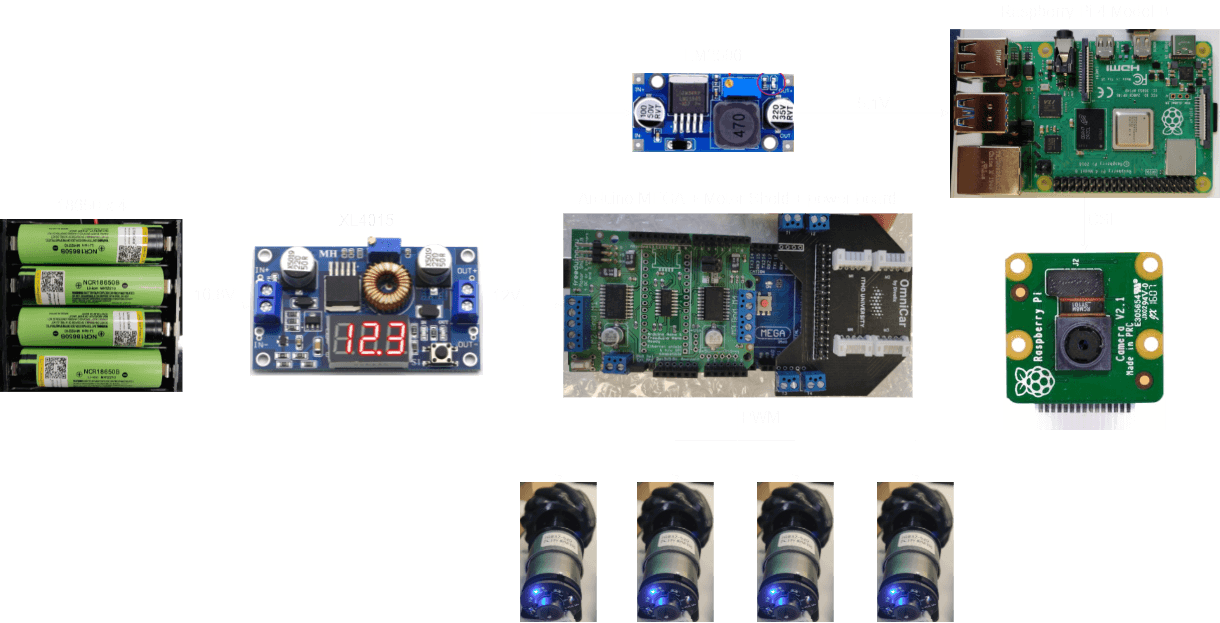
Hardware
Software
